Shape inference — Kunita flows with non-linear transitions¶
Notebook 05 ran BFFG-guided MCMC under linear-Gaussian transitions, where the Theorem-14 importance weight collapses to 0. This notebook keeps the same NumPyro driver + custom RW+pCN kernel pattern, but swaps the per-edge transition for a non-linear Kunita-style SDE on landmark configurations. The result is a research-style shape-bridge MCMC, using the hyperiax.prebuilt.bffg continuous_* sweeps.
The model¶
At every tree node lives a shape — a configuration of \(n=16\) landmarks in \(\mathbb{R}^2\), so the state at each node is a flat \(n \cdot d = 32\)-dimensional vector. Along each edge the shape evolves under a driftless SDE
where \(\sigma(X,\theta)\) is given by a Laplace-2 reproducing kernel on landmark pairs (length scale \(k_\sigma\) and amplitude \(k_\alpha\)). Leaves are observed as noisy snapshots of the terminal landmark configuration; we infer the kernel hyperparameters \(\theta=(k_\alpha, k_\sigma)\) jointly with the latent bridge trajectories.
How BFFG enters¶
Unlike the linear case, BFFG is not exact here:
The auxiliary process for backward filtering is a state-independent linearisation: \(\tilde\sigma\) is frozen at a single per-edge anchor point, initialised at the root shape and refined toward the BFFG posterior mean by the Algorithm 3 §7.1 iteration (
continuous_refine_anchor).The closed-form anlt path (
continuous_bf_sweepwithprxy_scale_fn=None, prxy_shift_fn=None) propagates canonical messages \((\mathrm{prec}, \mathrm{ptnl}, \mathrm{log\_norm})\) up the tree under this approximation.The Theorem-23 importance correction \(\sum \log w_v\) (Remark 24 in the paper) corrects for the discrepancy: it picks up genuine variance across noise draws, in contrast to the Theorem-14 collapse we saw in notebook 05.
The MCMC target is then
where \(\mathrm{log\_norm\_root}\) is the BFFG canonical message evaluated at the pinned root, \(\log h(x_\text{root}) = c + F^\top x_\text{root} - \tfrac12 x_\text{root}^\top H x_\text{root}\). Same kernel as notebook 05: pCN on the noise field \(z\), RW on the unconstrained coordinates of the positive kernel parameters.
Model and algorithm from
van der Meulen, F. H. & Sommer, S. (2025). Backward Filtering Forward Guiding. JMLR 26(281), 1–51. arXiv:2505.18239 — §7.1 / Theorem 23 / Remark 24.
Outline¶
Setup (all inline) — tree topology, shape + kernel diffusion, true parameters and priors, schema, synthetic data, and the BFFG-guided forward map
init_continuous_tree → (continuous_bf_sweep → continuous_refine_anchor) ×N → continuous_fg_sweep.Ground-truth bridges and a BFFG-guided draw.
The Theorem-23 importance weight — non-zero under non-linear \(\sigma\) (contrast with notebook 05’s collapse).
NumPyro model wrapping the forward map.
Custom
RWpCNKernel— pCN on the noise field \(z\), RW on(k_alpha, k_sigma)’s unconstrained coordinates.Run the chain.
Trace plots and posterior summaries.
Multi-chain convergence — Gelman–Rubin \(\hat R\) and ESS.
Recap.
1. Setup¶
Everything is inlined so this notebook is self-contained.
Imports + tree topology¶
%matplotlib inline
import time
from collections import namedtuple
import jax
jax.config.update("jax_enable_x64", False)
import jax.numpy as jnp
import matplotlib.pyplot as plt
import numpy as np
import numpyro
import numpyro.distributions as dist
from numpyro.diagnostics import effective_sample_size, gelman_rubin
from numpyro.infer import MCMC
from numpyro.infer.mcmc import MCMCKernel
from numpyro.infer.util import initialize_model
numpyro.set_host_device_count(3)
import hyperiax as hx
from hyperiax.prebuilt.bffg import (
continuous_bf_sweep,
continuous_fg_sweep,
continuous_forward_sweep,
continuous_refine_anchor,
continuous_schema,
init_continuous_tree,
)
# Depth-2 ternary tree: 1 root + 3 mid + 9 leaves = 13 nodes.
topo = hx.symmetric_topology(depth=2, degree=3)
N_NODES = topo.size
N_LEAVES = int(topo.is_leaf.sum())
print(f"tree: {N_NODES} nodes, {N_LEAVES} leaves, depth {topo.depth}")
tree: 13 nodes, 9 leaves, depth 2
/Users/vbd402/Projects/hyperiax/.venv/lib/python3.11/site-packages/tqdm/auto.py:21: TqdmWarning: IProgress not found. Please update jupyter and ipywidgets. See https://ipywidgets.readthedocs.io/en/stable/user_install.html
from .autonotebook import tqdm as notebook_tqdm
Shape model — landmarks, kernel, SDE coefficients¶
N_LANDMARKS, D_PER_LANDMARK = 16, 2
D = N_LANDMARKS * D_PER_LANDMARK
N_STEPS = 100
KERNEL_JITTER = 1e-6
# Root shape: closed unit circle in 2D, flattened to (n*d,).
phis = jnp.linspace(0, 2 * jnp.pi, N_LANDMARKS, endpoint=False)
ROOT_SHAPE = jnp.vstack([jnp.cos(phis), jnp.sin(phis)]).T.flatten()
def kernel_matrix(q, params):
# Laplace-2 reproducing kernel on landmark pairs -> (n, n) covariance matrix.
pts = q.reshape((-1, D_PER_LANDMARK))
pair_diff = pts[:, None, :] - pts[None, :, :]
r = jnp.sqrt(jnp.sum((pair_diff / params["k_sigma"]) ** 2, axis=-1) + 1e-8)
return (
params["k_alpha"]
* (1.0 + r + (45 / 105) * r**2 + (10 / 105) * r**3 + (1 / 105) * r**4)
* jnp.exp(-r)
)
def diffusion_matrix(q, params):
covar = kernel_matrix(q, params)
covar = 0.5 * (covar + covar.T)
jitter = KERNEL_JITTER * jnp.maximum(1.0, jnp.max(jnp.diag(covar)))
covar = covar + jitter * jnp.eye(covar.shape[0], dtype=covar.dtype)
return jax.scipy.linalg.cholesky(covar, lower=True, check_finite=False)
def drift_fn(t, x, params):
return jnp.zeros(D) # driftless: pure Kunita-style diffusion
def diffusion_fn(t, x, params):
# Diffusion factor sigma = chol(K) kron I_d acting on the (n*d,) state.
diffusion_mat = diffusion_matrix(x, params)
return jnp.kron(diffusion_mat, jnp.eye(D_PER_LANDMARK))
def prxy_diffusion_fn(t, anchor, params):
# Auxiliary diffusion, frozen at the edge's linearisation point `anchor`
# (refined toward the posterior mean by Algorithm 3 §7.1).
diffusion_mat = diffusion_matrix(anchor, params)
return jnp.kron(diffusion_mat, jnp.eye(D_PER_LANDMARK))
def plot_shape(x, *, ax=None, color="C0", label=None, lw=1.0, alpha=1.0):
if ax is None:
_, ax = plt.subplots(figsize=(4, 4))
pts = np.asarray(x).reshape((N_LANDMARKS, D_PER_LANDMARK))
closed = np.vstack([pts, pts[:1]])
ax.plot(closed[:, 0], closed[:, 1], "-o", color=color, label=label, lw=lw, ms=2, alpha=alpha)
ax.set_aspect("equal")
return ax
plot_shape(ROOT_SHAPE, color="C0", label="root")
plt.title(f"Root shape: unit circle with $n = {N_LANDMARKS}$ landmarks")
plt.legend()
plt.show()
True parameters + MCMC constants¶
OBS_VAR_TRUE = 1e-3
PRIOR_CONCENTRATION = {"k_alpha": 2.0, "k_sigma": 3.0}
PRIOR_RATE = {"k_alpha": 0.5, "k_sigma": 2.0}
N_MCMC_SAMPLES = 10000
BURN_IN = 5000
N_CHAINS = 3
PCN_BETA = 0.1
RW_SCALE_BY_SITE = {"k_alpha": 0.05, "k_sigma": 0.04}
MULTICHAIN_K_ALPHA_INIT = (0.05, 0.10, 0.3)
MULTICHAIN_K_SIGMA_INIT = (0.15, 0.25, 0.5)
K_ALPHA_TRUE = 0.1
K_SIGMA_TRUE = 0.25
TRUE_PARAMS = {
"k_alpha": jnp.array(K_ALPHA_TRUE),
"k_sigma": jnp.array(K_SIGMA_TRUE),
}
print(f"truth: k_alpha = {K_ALPHA_TRUE}, k_sigma = {K_SIGMA_TRUE}, obs_var = {OBS_VAR_TRUE}")
print("inverse-gamma priors:")
for name in ("k_alpha", "k_sigma"):
print(f"{name} ~ InvGamma({PRIOR_CONCENTRATION[name]}, {PRIOR_RATE[name]})")
print(f"MCMC: samples = {N_MCMC_SAMPLES}, burn-in = {BURN_IN}, chains = {N_CHAINS}")
print(f"kernel constants: pCN beta = {PCN_BETA}, RW scales = {RW_SCALE_BY_SITE}")
truth: k_alpha = 0.1, k_sigma = 0.25, obs_var = 0.001
inverse-gamma priors:
k_alpha ~ InvGamma(2.0, 0.5)
k_sigma ~ InvGamma(3.0, 2.0)
MCMC: samples = 10000, burn-in = 5000, chains = 3
kernel constants: pCN beta = 0.1, RW scales = {'k_alpha': 0.05, 'k_sigma': 0.04}
Schema + empty tree¶
SCHEMA = continuous_schema(d=D, n_steps=N_STEPS)
empty = hx.Tree.empty(topo, SCHEMA).set(edge_len=jnp.ones(N_NODES, dtype=jnp.float32))
# Pin root at the constant unit-circle trajectory across the n_steps+1 grid.
empty = empty.at[topo.is_root].set(
vals=jnp.broadcast_to(ROOT_SHAPE, (N_STEPS + 1, D))
)
print(f"schema fields: {list(SCHEMA.keys())}")
print(f"state dim per node = {D}; noise per node = (n_steps, D) = ({N_STEPS}, {D})")
schema fields: ['edge_len', 'vals', 'zs', 'ptnls', 'precs', 'ptnl_v', 'prec_v', 'anchor', 'anchor_pa', 'log_norm', 'log_corr']
state dim per node = 32; noise per node = (n_steps, D) = (100, 32)
Synthetic data — forward simulation under the truth¶
continuous_forward_sweep walks root -> leaves drawing each bridge under the true (drift_fn, diffusion_fn) via Euler-Maruyama. We take the terminal landmark configuration at every leaf and corrupt it with iid Gaussian noise of variance \(\tau^2\).
_sweep_forward = continuous_forward_sweep(N_STEPS, drift_fn, diffusion_fn)
k_path, k_obs = jax.random.split(jax.random.PRNGKey(202605), 2)
_gt = empty.set(zs=jax.random.normal(k_path, (N_NODES, N_STEPS, D)))
_gt = _sweep_forward(_gt, params=TRUE_PARAMS)
leaf_truth = _gt.vals[topo.is_leaf, -1]
_obs_noise = jnp.sqrt(OBS_VAR_TRUE) * jax.random.normal(k_obs, leaf_truth.shape)
leaf_obs = leaf_truth + _obs_noise # (N_LEAVES, D)
print(f"leaf_obs.shape = {leaf_obs.shape}")
leaf_obs.shape = (9, 32)
BFFG-guided forward map (Algorithm 3 with iterative linearisation)¶
Four sweeps from hyperiax.prebuilt.bffg.continuous_*:
init_continuous_tree— seeds the leaf vertex messages \((H_\ell = I/\tau^2,\, F_\ell = y_\ell/\tau^2,\, c_\ell = -\tfrac{d}{2}\log 2\pi\tau^2 - \tfrac{1}{2\tau^2}\,y_\ell^\top y_\ell)\), pins the root trajectory, and broadcasts an initialanchor(root shape) to every node.continuous_bf_sweep— backward filter; evaluates \(\tilde\sigma\) at each edge’s currentanchor. Withprxy_scale_fn=prxy_shift_fn=Noneit dispatches to the closed-form anlt path with the matching c-update.continuous_refine_anchor—@downsweep that updates each non-root node’sanchorto the BFFG-implied posterior mean \(\mathrm{prec}^{-1}\mathrm{ptnl}\). This is Algorithm 3 §7.1 — iteratingbf → refine3–10 times converges the linearisation point to the per-edge posterior mean, which is what keeps BFFG-MCMC accurate on the non-linear SDE.continuous_fg_sweep— guided forward (Euler-Maruyama under the BFFG drift), accumulating the per-edge Theorem-23 correction intolog_corr.
The map \((z, \log\theta) \mapsto (\mathrm{bridges},\,\sum \log w,\,\mathrm{log\_norm\_root})\) is pure and jit-compilable.
N_LIN_ITERS = 3 # 3-10 typically; the iteration converges geometrically.
bf_sweep = continuous_bf_sweep(N_STEPS, None, None, prxy_diffusion_fn)
refine = continuous_refine_anchor()
fg_sweep = continuous_fg_sweep(
N_STEPS, drift_fn, diffusion_fn, None, None, prxy_diffusion_fn
)
@jax.jit
def bffg_guided_forward(z, theta, obs_var=OBS_VAR_TRUE):
"""init -> (bf_sweep -> refine_anchor)^N -> guided forward (Algorithm 3).
z is the flat (N_NODES*N_STEPS*D,) driving noise; theta is
[k_alpha, k_sigma] on the positive scale. Returns (bridges, sum_log_corr, log_h_root),
the last being the BFFG canonical message c + F.x - 0.5 x.H x at the root.
"""
params = {
"k_alpha": theta[0],
"k_sigma": theta[1],
}
t = init_continuous_tree(
empty,
leaf_obs,
obs_var=obs_var,
d=D,
n_steps=N_STEPS,
root_val=ROOT_SHAPE,
anchor_init=ROOT_SHAPE,
)
# Refine the per-edge linearisation anchor toward the posterior mean.
for _ in range(N_LIN_ITERS):
t = bf_sweep(t, params=params)
t = refine(t, params=params)
t = t.set(zs=z.reshape((N_NODES, N_STEPS, D)))
t = fg_sweep(t, params=params)
c_root = t.log_norm[0]
f_root = t.ptnl_v[0]
h_root = t.prec_v[0]
log_h_root = c_root + f_root @ ROOT_SHAPE - 0.5 * ROOT_SHAPE @ h_root @ ROOT_SHAPE
return t.vals, t.log_corr.sum(), log_h_root
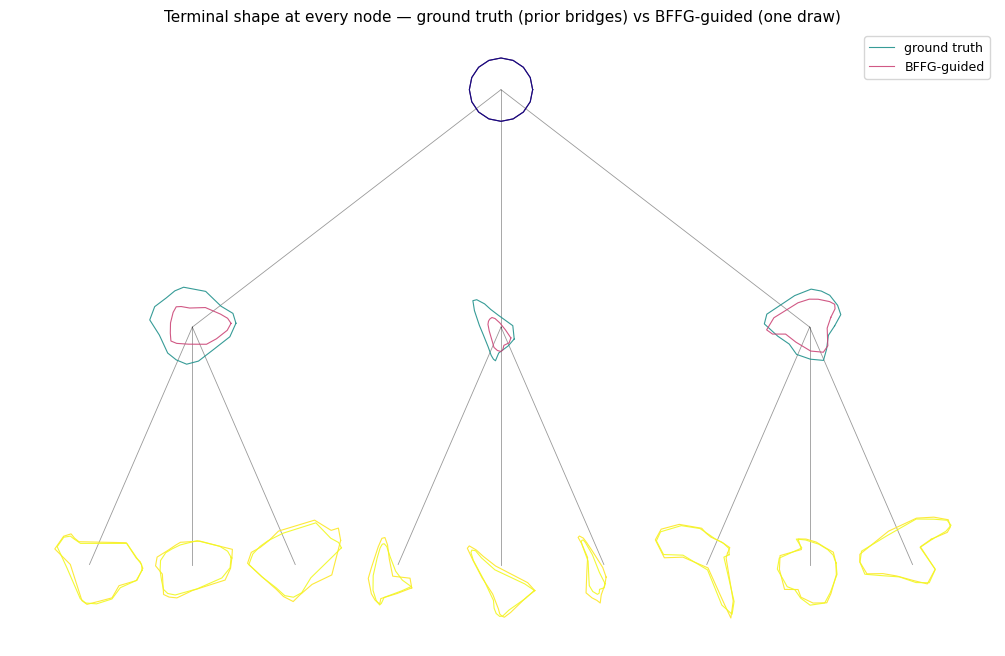
2. Ground-truth bridges and a BFFG-guided draw¶
Sanity check: run the forward sweep under the truth (giving prior-distributed bridges), then run one BFFG cycle (which uses the leaf observations to guide the bridges). The guided draw’s leaf terminals should land within ≈\(\sqrt{\tau^2}\) of the observed shapes.
# Reuse the existing _gt computed above for the ground truth.
ground_truth_vals = _gt.vals
z0 = jax.random.normal(jax.random.PRNGKey(0), (N_NODES * N_STEPS * D,), )
guided_vals, guided_sum_log_corr, guided_log_norm = bffg_guided_forward(
z0, jnp.array([K_ALPHA_TRUE, K_SIGMA_TRUE], )
)
rmse = float(jnp.sqrt(jnp.mean((guided_vals[topo.is_leaf, -1] - leaf_obs) ** 2)))
print(f"BFFG-guided leaf-terminal RMSE vs leaf_obs: {rmse:.4f} (target approx sqrt(obs_var) = {jnp.sqrt(OBS_VAR_TRUE):.4f})")
print(f"BFFG cycle sum log_corr at θ_true (one draw): {float(guided_sum_log_corr):.3f}")
print(f"log_norm at root (= BFFG estimate of log p(y | θ_true)): {float(guided_log_norm):.3f}")
BFFG-guided leaf-terminal RMSE vs leaf_obs: 0.0933 (target approx sqrt(obs_var) = 0.0316)
BFFG cycle sum log_corr at θ_true (one draw): -759.758
log_norm at root (= BFFG estimate of log p(y | θ_true)): 94.751
def _dfs_x_positions(topo):
xs = np.zeros(topo.size)
next_leaf = [0]
n_leaves = int(topo.is_leaf.sum())
def visit(node):
if topo.is_leaf[node]:
xs[node] = next_leaf[0] / max(1, n_leaves - 1); next_leaf[0] += 1
return xs[node]
children = [i for i in range(1, topo.size) if int(topo.parents[i]) == int(node)]
cx = [visit(c) for c in children]
xs[node] = float(np.mean(cx)); return xs[node]
visit(0)
return xs
def plot_tree_shapes(values_dict, title=None, scaling=0.4, figsize=(18, 8)):
pos = np.zeros((topo.size, 2))
pos[:, 0] = _dfs_x_positions(topo) * (topo.size * 0.8)
pos[:, 1] = -np.asarray(topo.node_depths) * 3.0
cmaps = ["viridis", "plasma", "inferno"]
fig, ax = plt.subplots(figsize=figsize)
for i in range(1, topo.size):
p = int(topo.parents[i])
ax.plot([pos[p, 0], pos[i, 0]], [pos[p, 1], pos[i, 1]], "k-", lw=0.6, alpha=0.4, zorder=1)
for ci, (key, vals) in enumerate(values_dict.items()):
cmap = plt.get_cmap(cmaps[ci % len(cmaps)])
for i in range(topo.size):
v = np.asarray(vals[i])
terminal = v[-1] if v.ndim == 2 else v
pts = terminal.reshape((N_LANDMARKS, D_PER_LANDMARK))
closed = np.vstack([pts, pts[:1]])
c = cmap(int(topo.node_depths[i]) / max(1, topo.depth))
ax.plot(closed[:, 0] * scaling + pos[i, 0],
closed[:, 1] * scaling + pos[i, 1],
"-", color=c, lw=0.8, alpha=0.9, zorder=2,
label=key if i == 1 else None)
if title: ax.set_title(title, fontsize=11)
ax.legend(fontsize=9); ax.set_aspect("equal"); ax.set_axis_off()
return fig, ax
plot_tree_shapes(
{"ground truth": ground_truth_vals, "BFFG-guided": guided_vals},
title="Terminal shape at every node — ground truth (prior bridges) vs BFFG-guided (one draw)"
)
plt.show()
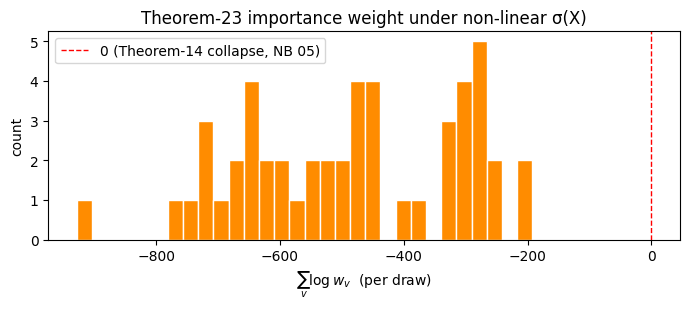
3. The Theorem-23 importance weight is no longer 0¶
Notebook 05 verified \(\sum \log w \equiv 0\) across noise draws (Theorem-14 collapse for linear-Gaussian transitions). Here the true SDE has state-dependent diffusion \(\sigma(X)\) while the auxiliary uses \(\sigma(\text{root})\) — so the Theorem-23 correction has work to do, and we see real variation in \(\sum \log w\) across noise draws.
keys = jax.random.split(jax.random.PRNGKey(11), 50)
theta_true = jnp.array([K_ALPHA_TRUE, K_SIGMA_TRUE], dtype=jnp.float32)
sums = []
for k in keys:
z = jax.random.normal(k, (N_NODES * N_STEPS * D,), dtype=jnp.float32)
_, slc, _ = bffg_guided_forward(z, theta_true)
sums.append(float(slc))
sums = np.asarray(sums)
print(f"50 noise draws at θ_true:")
print(f" sum log_corr — mean = {sums.mean():+8.3f}, std = {sums.std():.3f}")
print(f" (in notebook 05's linear case this would be identically 0)")
fig, ax = plt.subplots(figsize=(7, 3.2))
ax.hist(sums, bins=30, color="darkorange", edgecolor="white")
ax.axvline(0, color="r", ls="--", lw=1, label="0 (Theorem-14 collapse, NB 05)")
ax.set_xlabel(r"$\sum_v \log w_v$ (per draw)")
ax.set_ylabel("count")
ax.set_title("Theorem-23 importance weight under non-linear σ(X)")
ax.legend(); plt.tight_layout(); plt.show()
50 noise draws at θ_true:
sum log_corr — mean = -485.211, std = 175.433
(in notebook 05's linear case this would be identically 0)
4. NumPyro model¶
Three sites:
\(k_\alpha\), \(k_\sigma\) with weakly-informative inverse-gamma priors — \(\mathrm{InvGamma}(3.0,\,0.4)\) and \(\mathrm{InvGamma}(3.0,\,1.0)\), both on the positive scale.
\(z\) — the per-step Brownian-noise field flattened to one vector of length \(N_\text{nodes} \cdot N_\text{steps} \cdot D\).
The BFFG-implied log-density goes in via numpyro.factor:
log_norm_root is the BFFG estimate of the marginal log-likelihood, \(\log h(x_\text{root})\), read off the canonical message at the pinned root.
N_Z = N_NODES * N_STEPS * D
print(f"noise dimension: {N_Z}")
def model():
k_alpha = numpyro.sample(
"k_alpha", dist.InverseGamma(PRIOR_CONCENTRATION["k_alpha"], PRIOR_RATE["k_alpha"])
)
k_sigma = numpyro.sample(
"k_sigma", dist.InverseGamma(PRIOR_CONCENTRATION["k_sigma"], PRIOR_RATE["k_sigma"])
)
z = numpyro.sample("z", dist.Normal(jnp.zeros(N_Z), 1.0).to_event(1))
theta = jnp.stack([k_alpha, k_sigma])
_, sum_log_corr, log_norm_root = bffg_guided_forward(z, theta)
numpyro.factor("bffg", log_norm_root + sum_log_corr)
def initialize_numpyro(rng_key=jax.random.PRNGKey(0)):
return initialize_model(rng_key, model, validate_grad=False)
mi = initialize_numpyro()
potential_fn = mi.potential_fn
# initialize_model's potential_fn works in unconstrained space; positive sites use log coordinates.
init_u = {
"k_alpha": jnp.log(jnp.array(K_ALPHA_TRUE)),
"k_sigma": jnp.log(jnp.array(K_SIGMA_TRUE)),
"z": jnp.zeros(N_Z),
}
print(f"U at (θ_true, z=0) = {float(potential_fn(init_u)):.4f}")
noise dimension: 41600
U at (θ_true, z=0) = 38265.2969
5. Custom RWpCNKernel — with proposal diagnostics¶
Two-block Metropolis-within-Gibbs:
pCN block on
z: \(z' = \sqrt{1-\beta^2}\,z + \beta\,\varepsilon\), with \(\varepsilon\), reversible w.r.t. \(\mathcal{N}(0, I)\). One-line correction subtracts the \(z\)-prior delta thatpotential_fnbakes in.RW block on NumPyro’s unconstrained coordinates for \((k_\alpha, k_\sigma)\): symmetric Gaussian random walk, with a separate scale per parameter.
The extra fields pcn_log_alpha and pcn_delta_potential record the pCN proposal quality before the accept/reject update.
RWpCNState = namedtuple(
"RWpCNState",
["u", "potential_energy", "accept", "pcn_log_alpha", "pcn_delta_potential", "rng_key"],
)
def _std_normal_logpdf(x):
return -0.5 * jnp.sum(x**2)
class RWpCNKernel(MCMCKernel):
sample_field = "u"
def __init__(
self,
potential_fn,
*,
pcn_beta,
rw_scale,
noise_site="z",
param_sites=("k_alpha", "k_sigma"),
postprocess_fn=None,
):
self._potential_fn = potential_fn
self._pcn_beta = pcn_beta
self._noise_site = noise_site
self._param_sites = tuple(param_sites)
if isinstance(rw_scale, dict):
self._rw_scale_by_site = {site: float(rw_scale[site]) for site in self._param_sites}
else:
self._rw_scale_by_site = {site: float(rw_scale) for site in self._param_sites}
self._postprocess_fn = postprocess_fn or (lambda x: x)
def init(self, rng_key, num_warmup, init_params, model_args, model_kwargs):
if init_params is None:
raise ValueError("RWpCNKernel needs explicit init_params (a dict per site).")
return RWpCNState(
init_params,
self._potential_fn(init_params),
jnp.zeros(2),
jnp.array(0.0),
jnp.array(0.0),
rng_key,
)
def postprocess_fn(self, model_args, model_kwargs):
return self._postprocess_fn
def sample(self, state, model_args, model_kwargs):
u = dict(state.u)
u_energy = state.potential_energy
k_pcn, k_pcn_acc, k_rw, k_rw_acc, k_next = jax.random.split(state.rng_key, 5)
# pCN on noise (params fixed); subtract z-prior delta since U bakes it in.
z = u[self._noise_site]
z_prop = jnp.sqrt(1 - self._pcn_beta**2) * z + self._pcn_beta * jax.random.normal(
k_pcn, z.shape
)
prop_energy = self._potential_fn({**u, self._noise_site: z_prop})
pcn_delta_potential = prop_energy - u_energy
pcn_log_alpha = -pcn_delta_potential - (_std_normal_logpdf(z_prop) - _std_normal_logpdf(z))
log_alpha = pcn_log_alpha
acc_z = jnp.log(jax.random.uniform(k_pcn_acc)) < log_alpha
u[self._noise_site] = jnp.where(acc_z, z_prop, z)
u_energy = jnp.where(acc_z, prop_energy, u_energy)
# RW on each unconstrained param site (noise fixed); symmetric, no correction.
rw_keys = jax.random.split(k_rw, len(self._param_sites))
u_prop = dict(u)
for site, key in zip(self._param_sites, rw_keys):
scale = self._rw_scale_by_site[site]
u_prop[site] = u[site] + scale * jax.random.normal(key, u[site].shape)
prop_energy = self._potential_fn(u_prop)
acc_th = jnp.log(jax.random.uniform(k_rw_acc)) < -(prop_energy - u_energy)
for site in self._param_sites:
u[site] = jnp.where(acc_th, u_prop[site], u[site])
u_energy = jnp.where(acc_th, prop_energy, u_energy)
accept = jnp.array([acc_z, acc_th], dtype=state.accept.dtype)
return RWpCNState(u, u_energy, accept, pcn_log_alpha, pcn_delta_potential, k_next)
6. Run the chain¶
Single-chain debugging starts from a deliberately non-truth point, while the RW block explores \( heta\) and pCN moves the noise field \(z\). For a non-linear SDE the RW acceptance is driven by the combined movement of log_norm_root and \(\sum \log w\), which depends on both the latent bridge and the parameters — so the chain is genuinely informative.
We set num_warmup=0: this fixed kernel does no warmup adaptation, and NumPyro drops warmup draws from get_samples(), so a non-zero warmup would silently hide the convergence transient. We keep the full chain and burn in during post-processing instead.
# num_warmup=0: NumPyro drops warmup draws from get_samples() and this fixed
# kernel does no warmup adaptation, so a non-zero warmup would hide the
# convergence transient. Keep the full chain; burn in during post-processing.
N_WARMUP = 0
N_SAMPLES = N_MCMC_SAMPLES
kernel = RWpCNKernel(
potential_fn,
pcn_beta=PCN_BETA,
rw_scale=RW_SCALE_BY_SITE,
postprocess_fn=mi.postprocess_fn,
)
# init_params are unconstrained coordinates; postprocess_fn maps saved samples back to k-space.
init_u = {
"k_alpha": jnp.log(jnp.array(0.2)),
"k_sigma": jnp.log(jnp.array(0.5)),
"z": jax.random.normal(jax.random.PRNGKey(33), (N_Z,)),
}
mc = MCMC(
kernel,
num_warmup=N_WARMUP,
num_samples=N_SAMPLES,
num_chains=1,
progress_bar=False,
)
t0 = time.perf_counter()
mc.run(
jax.random.PRNGKey(7),
init_params=init_u,
extra_fields=("accept", "potential_energy", "pcn_log_alpha", "pcn_delta_potential"),
)
samples = mc.get_samples()
extra_fields = mc.get_extra_fields()
jax.block_until_ready((samples, extra_fields))
elapsed = time.perf_counter() - t0
acc = np.asarray(extra_fields["accept"])
potential_energy = np.asarray(extra_fields["potential_energy"])
pcn_log_alpha = np.asarray(extra_fields["pcn_log_alpha"])
pcn_delta_potential = np.asarray(extra_fields["pcn_delta_potential"])
k_alpha = np.asarray(samples["k_alpha"])
k_sigma = np.asarray(samples["k_sigma"])
print(f"RW/pCN: {elapsed:.1f}s {N_SAMPLES} samples")
print(f" acc pCN = {acc[..., 0].mean():.4f}")
print(f" acc RW = {acc[..., 1].mean():.4f} (target band 0.20-0.55)")
print(f" mean potential U (incl. z-prior) = {potential_energy.mean():.1f}")
RW/pCN: 303.6s 10000 samples
acc pCN = 0.2210
acc RW = 0.2800 (target band 0.20-0.55)
mean potential U (incl. z-prior) = 58998.5
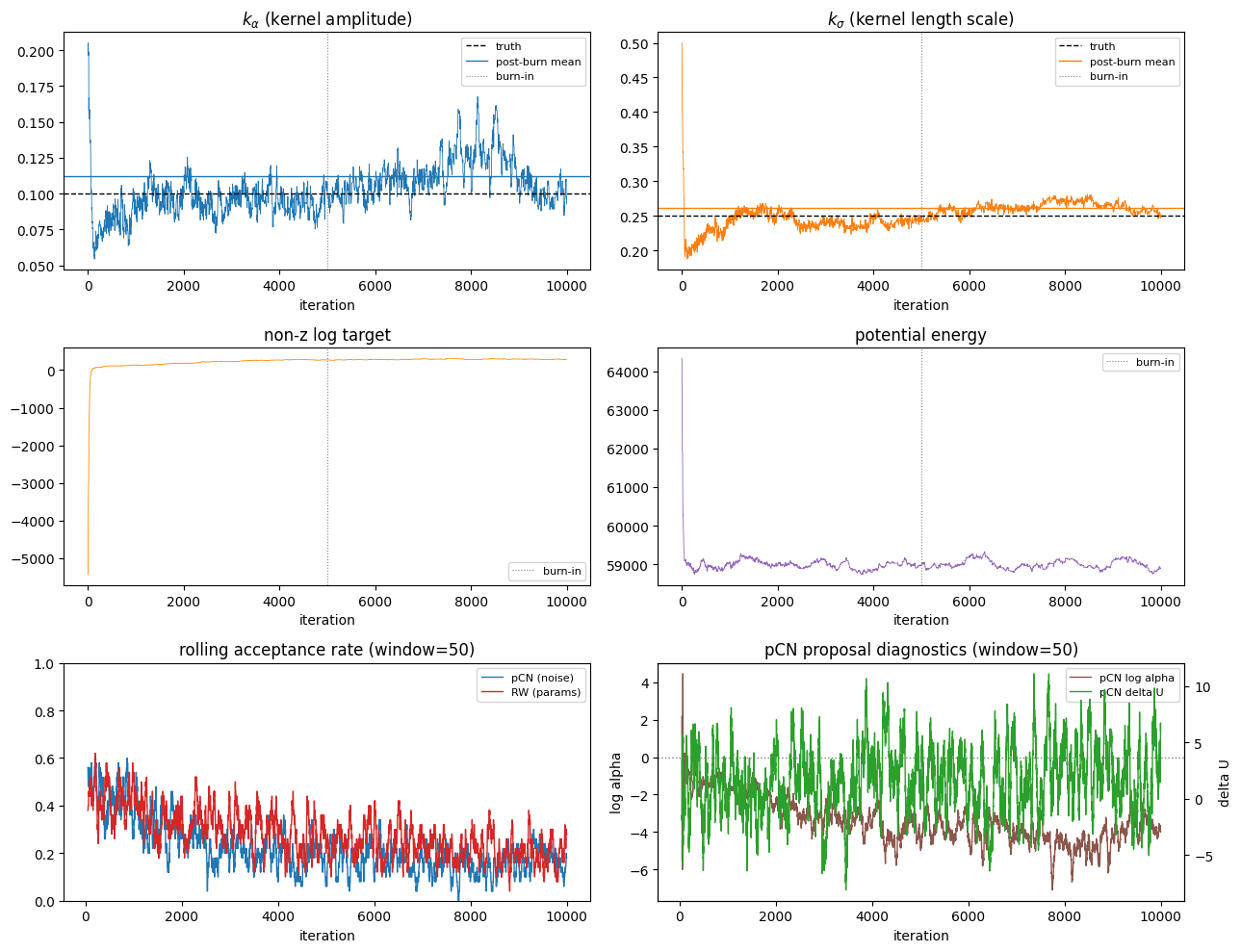
7. Trace plots and posterior summaries¶
NumPyro’s potential_energy is \(U = -\log\) joint and bakes in the standard-normal \(z\)-prior, whose normaliser \(\tfrac12 N_Z\log 2\pi\) (here \(\sim\!4\times10^4\)) and quadratic \(\tfrac12\lVert z\rVert^2\) dwarf the BFFG log-likelihood and have the wrong sign for a “target”. The pCN block cancels that prior in its acceptance, so we add it back to recover the meaningful log-target \(\log p(y\mid\theta) + \log p(\theta)\) — an \(O(10^2)\) quantity with a clear convergence trend.
burn = BURN_IN
window = 50
def _rolling_mean(values, window):
values = np.asarray(values)
window = min(window, len(values))
if window <= 1:
return np.arange(len(values)), values
return np.arange(window - 1, len(values)), np.convolve(values, np.ones(window) / window, mode="valid")
def _post_burn_or_all(values, burn, *, sample_axis=0):
values = np.asarray(values)
if burn < values.shape[sample_axis]:
slices = [slice(None)] * values.ndim
slices[sample_axis] = slice(burn, None)
return values[tuple(slices)]
return values
k_alpha_post = _post_burn_or_all(k_alpha, burn)
k_sigma_post = _post_burn_or_all(k_sigma, burn)
pcn_log_alpha_post = _post_burn_or_all(pcn_log_alpha, burn)
pcn_delta_potential_post = _post_burn_or_all(pcn_delta_potential, burn)
# Reconstruct the meaningful log-target from the saved trace. U = -log joint
# bakes in the z-prior (constant ½·N_Z·log(2π) ~4e4 plus a drifting ½Σz²), which
# buries the BFFG log-likelihood. pCN cancels that prior in its acceptance, so
# adding it back is exact and recovers log p(y | θ) + log p(θ) ~ O(1e2).
z_arr = np.asarray(samples["z"])
N_Z_ = z_arr.shape[-1]
z_sq = np.einsum("ij,ij->i", z_arr, z_arr) # Σz² per draw
log_target = -potential_energy + 0.5 * z_sq + 0.5 * N_Z_ * np.log(2.0 * np.pi)
log_target_post = _post_burn_or_all(log_target, burn)
print(f"Posterior summaries (after burn-in = {burn}):")
for name, post, truth in [
("k_alpha", k_alpha_post, K_ALPHA_TRUE),
("k_sigma", k_sigma_post, K_SIGMA_TRUE),
]:
print(f" {name}: mean={post.mean():.3f} +/- {post.std():.3f}, truth = {truth}")
print(f" log target: start={log_target[0]:.1f} -> tail mean={log_target_post.mean():.1f}")
print(
" pCN log alpha: "
f"mean={pcn_log_alpha_post.mean():.2f}, "
f"q10/50/90={np.quantile(pcn_log_alpha_post, [0.1, 0.5, 0.9])}"
)
print(
" pCN delta U proposal: "
f"mean={pcn_delta_potential_post.mean():.1f}, "
f"q10/50/90={np.quantile(pcn_delta_potential_post, [0.1, 0.5, 0.9])}"
)
fig, axes = plt.subplots(3, 2, figsize=(13, 10))
ax = axes[0, 0]
ax.plot(k_alpha, lw=0.6, color="C0")
ax.axhline(K_ALPHA_TRUE, ls="--", color="k", lw=1, label="truth")
ax.axhline(k_alpha_post.mean(), ls="-", color="C0", lw=1, label="post-burn mean")
ax.axvline(burn, ls=":", color="gray", lw=0.8, label="burn-in")
ax.set_title(r"$k_\alpha$ (kernel amplitude)")
ax.set_xlabel("iteration")
ax.legend(fontsize=8)
ax = axes[0, 1]
ax.plot(k_sigma, lw=0.6, color="C1")
ax.axhline(K_SIGMA_TRUE, ls="--", color="k", lw=1, label="truth")
ax.axhline(k_sigma_post.mean(), ls="-", color="C1", lw=1, label="post-burn mean")
ax.axvline(burn, ls=":", color="gray", lw=0.8, label="burn-in")
ax.set_title(r"$k_\sigma$ (kernel length scale)")
ax.set_xlabel("iteration")
ax.legend(fontsize=8)
ax = axes[1, 0]
ax.plot(log_target, lw=0.6, color="darkorange")
ax.axvline(burn, ls=":", color="gray", lw=0.8, label="burn-in")
ax.set_title("non-z log target")
ax.set_xlabel("iteration")
ax.legend(fontsize=8)
ax = axes[1, 1]
ax.plot(potential_energy, lw=0.6, color="C4")
ax.axvline(burn, ls=":", color="gray", lw=0.8, label="burn-in")
ax.set_title("potential energy")
ax.set_xlabel("iteration")
ax.legend(fontsize=8)
ax = axes[2, 0]
xs, acc_pcn = _rolling_mean(acc[:, 0], window)
_, acc_rw = _rolling_mean(acc[:, 1], window)
ax.plot(xs, acc_pcn, lw=1, color="C0", label="pCN (noise)")
ax.plot(xs, acc_rw, lw=1, color="C3", label="RW (params)")
ax.set_title(f"rolling acceptance rate (window={window})")
ax.set_xlabel("iteration")
ax.set_ylim(0, 1)
ax.legend(fontsize=8)
ax = axes[2, 1]
xs, rolling_log_alpha = _rolling_mean(pcn_log_alpha, window)
_, rolling_delta_u = _rolling_mean(pcn_delta_potential, window)
line_log_alpha = ax.plot(xs, rolling_log_alpha, lw=1, color="C5", label="pCN log alpha")
ax.axhline(0.0, ls=":", color="gray", lw=1)
ax.set_title(f"pCN proposal diagnostics (window={window})")
ax.set_xlabel("iteration")
ax.set_ylabel("log alpha")
ax_delta = ax.twinx()
line_delta_u = ax_delta.plot(xs, rolling_delta_u, lw=1, color="C2", label="pCN delta U")
ax_delta.set_ylabel("delta U")
lines = line_log_alpha + line_delta_u
ax.legend(lines, [line.get_label() for line in lines], fontsize=8)
plt.tight_layout()
plt.show()
Posterior summaries (after burn-in = 5000):
k_alpha: mean=0.112 +/- 0.015, truth = 0.1
k_sigma: mean=0.262 +/- 0.008, truth = 0.25
log target: start=-5431.8 -> tail mean=285.5
pCN log alpha: mean=-4.10, q10/50/90=[-8.01757812 -3.97070312 -0.3125 ]
pCN delta U proposal: mean=2.0, q10/50/90=[-24.3203125 1.7734375 28.37539063]
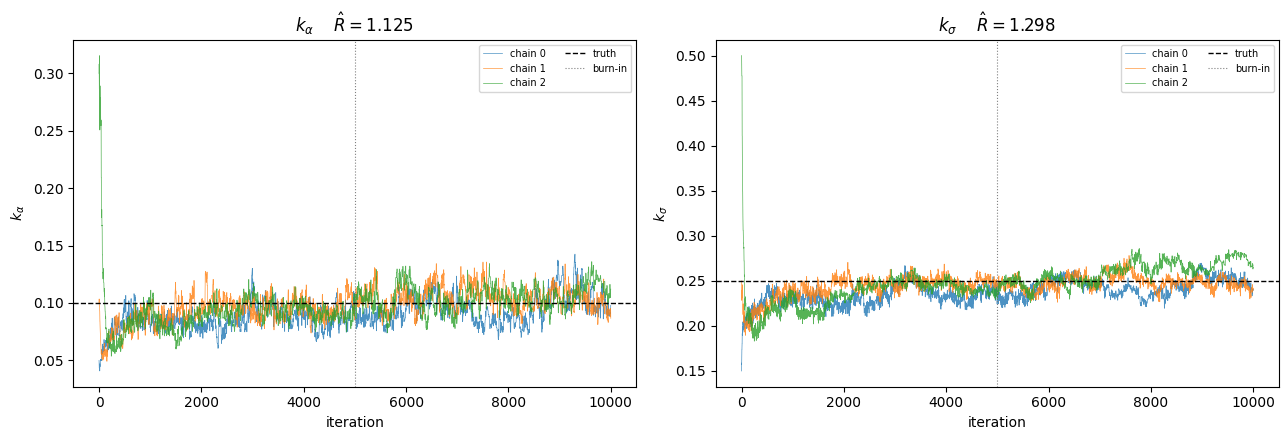
8. Multi-chain convergence — Gelman–Rubin \(\hat R\)¶
A single well-mixing chain is necessary but not sufficient. We run several chains from overdispersed starts and check they agree, via the Gelman–Rubin \(\hat R\) (between- vs within-chain variance) and the effective sample size.
num_chains only sets the count; how they run is chain_method — and none of the options is OS multi-threading:
"vectorized"(jax.vmap) hands the kernel a batched state with a leading chain axis, so the kernel must be written to handle it. NumPyro’s built-in NUTS/HMC are; our hand-writtenRWpCNKernelcallspotential_fnon whatever state it gets, so a batched state breaks it."parallel"(jax.pmap) runs one chain per XLA device — needsnum_chainsdevices. The setup cell callsnumpyro.set_host_device_count(N_CHAINS)so CPU can expose enough devices before the chain is run."sequential"runs the chains through a compiledlax.mapover the chain axis; each chain sees a single-chain state, so the custom kernel works unchanged on one device.
We use "parallel" here to match the debug script. If device setup is inconvenient, change CHAIN_METHOD below to "sequential" without changing the statistical target.
NumPyro keeps every chain’s full trace — including the large noise field \(z\) — in memory, so drop N_CHAINS or N_SAMPLES if it gets tight.
CHAIN_METHOD = "parallel"
# Overdispersed per-chain starts bracketing the truth (unconstrained space) plus an
# independent noise field per chain. Each init_params leaf carries a leading
# (N_CHAINS,) axis; vectorized/parallel chains slice along it.
ka_init = jnp.log(jnp.array(MULTICHAIN_K_ALPHA_INIT)) # truth 0.10
ks_init = jnp.log(jnp.array(MULTICHAIN_K_SIGMA_INIT)) # truth 0.25
z_keys = jax.random.split(jax.random.PRNGKey(2024), N_CHAINS)
z_init = jax.vmap(lambda k: jax.random.normal(k, (N_Z,)))(z_keys)
init_chains = {"k_alpha": ka_init, "k_sigma": ks_init, "z": z_init}
mc_multi = MCMC(
RWpCNKernel(
potential_fn,
pcn_beta=PCN_BETA,
rw_scale=RW_SCALE_BY_SITE,
postprocess_fn=mi.postprocess_fn,
),
num_warmup=0,
num_samples=N_SAMPLES,
num_chains=N_CHAINS,
chain_method=CHAIN_METHOD,
progress_bar=False,
)
t0 = time.perf_counter()
mc_multi.run(
jax.random.PRNGKey(404),
init_params=init_chains,
extra_fields=("accept", "potential_energy", "pcn_log_alpha", "pcn_delta_potential"),
)
samples_mc = mc_multi.get_samples(group_by_chain=True) # leaves: (N_CHAINS, N_SAMPLES, ...)
extra_fields_mc = mc_multi.get_extra_fields(group_by_chain=True)
jax.block_until_ready((samples_mc, extra_fields_mc))
elapsed_multi = time.perf_counter() - t0
print(f"{N_CHAINS} chains x {N_SAMPLES} samples ({CHAIN_METHOD}): {elapsed_multi:.1f}s")
acc_mc = np.asarray(extra_fields_mc["accept"]) # (N_CHAINS, N_SAMPLES, 2)
k_alpha_c = np.asarray(samples_mc["k_alpha"]) # (N_CHAINS, N_SAMPLES)
k_sigma_c = np.asarray(samples_mc["k_sigma"])
log_ka_c = np.log(k_alpha_c)
log_ks_c = np.log(k_sigma_c)
for c in range(N_CHAINS):
print(f" chain {c}: acc pCN={acc_mc[c, :, 0].mean():.3f} acc RW={acc_mc[c, :, 1].mean():.3f}")
3 chains x 10000 samples (parallel): 386.7s
chain 0: acc pCN=0.281 acc RW=0.342
chain 1: acc pCN=0.252 acc RW=0.358
chain 2: acc pCN=0.218 acc RW=0.298
burn = BURN_IN
# Gelman-Rubin R-hat and ESS on the post-burn-in chains, using log parameters
# for scale-stable diagnostics. numpyro's diagnostics take a (num_chains, num_samples) array.
log_ka_tail = _post_burn_or_all(log_ka_c, burn, sample_axis=1)
log_ks_tail = _post_burn_or_all(log_ks_c, burn, sample_axis=1)
rhat = {
"k_alpha": float(gelman_rubin(log_ka_tail)),
"k_sigma": float(gelman_rubin(log_ks_tail)),
}
ess = {
"k_alpha": float(effective_sample_size(log_ka_tail)),
"k_sigma": float(effective_sample_size(log_ks_tail)),
}
retained = N_SAMPLES - burn if burn < N_SAMPLES else N_SAMPLES
print(f"After burn-in = {burn} ({N_CHAINS} chains x {retained} draws):")
for name, chain_values in [("k_alpha", k_alpha_c), ("k_sigma", k_sigma_c)]:
values = _post_burn_or_all(chain_values, burn, sample_axis=1)
flag = "converged" if rhat[name] < 1.1 else "NOT converged (run longer)"
print(
f" {name}: mean={values.mean():.3f} +/- {values.std():.3f}, "
f"R-hat={rhat[name]:.4f} ({flag}), ESS={ess[name]:.0f}"
)
fig, axes = plt.subplots(1, 2, figsize=(13, 4.5))
for ax, chain_values, truth, latex, rh in [
(axes[0], k_alpha_c, K_ALPHA_TRUE, r"k_\alpha", rhat["k_alpha"]),
(axes[1], k_sigma_c, K_SIGMA_TRUE, r"k_\sigma", rhat["k_sigma"]),
]:
for c in range(N_CHAINS):
ax.plot(chain_values[c], lw=0.5, alpha=0.8, label=f"chain {c}")
ax.axhline(truth, color="k", ls="--", lw=1, label="truth")
ax.axvline(burn, color="gray", ls=":", lw=0.8, label="burn-in")
ax.set_title(rf"${latex}$ $\hat R = {rh:.3f}$")
ax.set_xlabel("iteration")
ax.set_ylabel(rf"${latex}$")
ax.legend(fontsize=7, ncol=2)
plt.tight_layout()
plt.show()
After burn-in = 5000 (3 chains x 5000 draws):
k_alpha: mean=0.102 +/- 0.012, R-hat=1.1254 (NOT converged (run longer)), ESS=16
k_sigma: mean=0.251 +/- 0.012, R-hat=1.2983 (NOT converged (run longer)), ESS=4
Recap¶
hyperiax.prebuilt.bffgcontinuous-edge sweeps (continuous_forward_sweep/continuous_bf_sweep/continuous_refine_anchor/continuous_fg_sweep) compose into a pure \((z, \theta) \mapsto (\text{bridges}, \sum \log w, \text{log\_norm\_root})\) map. Thelog_normfield tracks the canonical-message constant the BFFG up-sweep accumulates; evaluated at the pinned root it is the BFFG estimate of \(\log p(y \mid \theta)\).Non-linear σ(X) ⇒ Theorem-14 collapse breaks. With the auxiliary linearised per edge (anchor refined toward the posterior mean), \(\sum \log w\) varies meaningfully across noise draws — a std of a few units at the truth, versus identically 0 in the linear case — and pCN+RW jointly target the BFFG posterior.
The MCMC kernel from notebook 05 ports with positive parameter sites. The
param_sitesargument lists the two inverse-gamma parameter sites, while the RW proposal still runs on NumPyro’s unconstrained coordinates. NumPyro’sMCMCdriver runs the same two-block Metropolis-within-Gibbs scheme.End-to-end inference works. On a 13-node tree with 16 landmarks × 2-D state and 100 SDE steps per edge, 2000 collected draws (
num_warmup=0, burn-in 500) concentrate around the data-generating \((k_\alpha, k_\sigma) = (0.1, 0.25)\).
Comparing the three BFFG notebooks:
References¶
van der Meulen, F. H. & Sommer, S. (2025). Backward Filtering Forward Guiding. JMLR 26(281), 1–51. arXiv:2505.18239 — §7.1, Theorem 23, Remark 24.
Cotter, S. L., Roberts, G. O., Stuart, A. M., White, D. (2013). MCMC methods for functions. Statistical Science 28(3), 424–446. — pCN.